









21/01/2026
Científicos crearon una mano robótica súper versátil: desmontable, simétrica y puede tener cinco o seis dedos
Fuente: telam
Fue desarrollada por investigadores del MIT de Estados Unidos y la EPFL de Suiza. Por qué es ideal para tareas en la industria, rescate y exploración en zonas de difícil acceso
>Una mano El resultado principal de una investigación realizada por científicos del Instituto de Tecnología de Massachusetts (MIT) en los Estados Unidos y del Instituto Federal Suizo de Tecnología (EPFL), en Lausana, Suiza, es un diseño que permite a la Esta innovación promete transformar la manipulación de objetos en fábricas, servicios y misiones de exploración.
El avance abre la puerta a tareas que antes resultaban imposibles para los robots, como recoger cosas en rincones inaccesibles o manipular varios objetos seguidos. Según los científicos que la desarrollan, “la mano puede recuperar hasta tres objetos de forma secuencial y volver a acoplarse mientras mantiene un agarre seguro sobre los objetos”. Se publicó en la revista Los investigadores habían notado que la mayoría de las manos robóticas imitan a la humana, pero heredan defectos: la asimetría limita el agarre y obliga a usar los dedos de un solo lado. Esta limitación complica tomar varios objetos a la vez o moverse en espacios reducidos, porque el brazo tampoco ayuda mucho: el alcance está “estrictamente limitado por el rango del brazo”.Esto vuelve lento y poco eficiente cualquier intento de manipular objetos en distintas posiciones o direcciones.
El objetivo fue claro: inventar una mano robótica que no dependa de la anatomía humana. El desafío consistió en lograr un diseño simétrico y desmontable que hiciera posible tomar objetos desde cualquier lado y operar en áreas donde un brazo normal no funciona.El grupo de investigadores diseñó dos modelos de mano robótica, uno con cinco dedos y otro con seis. Ambas versiones cuentan con una palma de 16 centímetros de diámetro y una estructura completamente simétrica. Así, cualquier par de dedos puede realizar el mismo tipo de agarre, sin importar el lado.Esta función la distingue de cualquier otra innovación previa y permite acceder a rincones donde un robot fijo no llega.
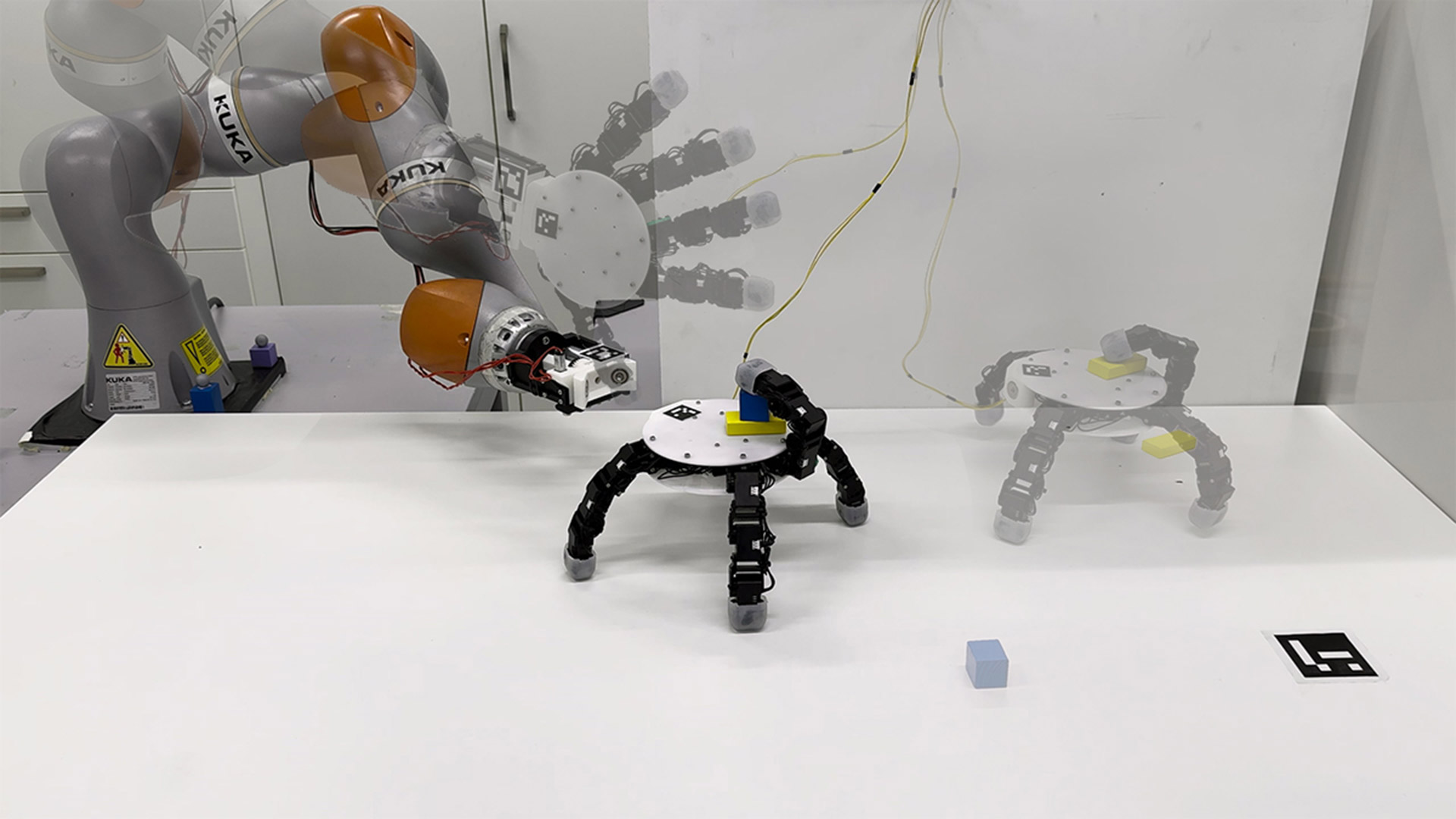
Durante los experimentos, la mano recogió hasta tres objetos de manera consecutiva y logró volver a acoplarse al brazo sin soltar ninguno.
El dispositivo replicó 33 tipos diferentes de agarre humano y soportó objetos de hasta 2 kilogramos. Esta versatilidad marca una diferencia frente a los modelos previos, que solo podían manejar un rango muy limitado de formas y pesos.
El equipo comprobó que la arquitectura simétrica ayuda a superar los límites de las manos robóticas tradicionales y de la mano humana. El diseño todavía enfrenta retos: es necesario probar la mano con objetos más grandes, pesados o de formas inusuales.
“La investigación futura puede explorar aplicaciones potenciales para esta tecnología, como acceder y realizar tareas en espacios confinados”, adelantaron los investigadores.
Concluyeron que la mano robótica desmontable y simétrica representa un cambio de paradigma para la robótica moderna.
Fuente: telam
Compartir
Notas Relacionadas
Comentarios
Aun no hay comentarios, sé el primero en escribir uno!

Acuario
ACUARIO (del 21 de enero al 19 de febrero)
Contarás con más información de la que desearías tener respecto a seres queridos. Pero aprende a distinguir entre verdades y mentiras. Te encontrarás cargado de nerviosismo y mal humor debido a circunstancias laborales. No descargues tu frustración con tu pareja. Te verás con energías renovadas hoy. Iniciarás con éxito múltiples proyectos y tendrás una claridad mental envidiable.Sugerencia: El dejar de alimentarte o descansar no proporcionará ningún beneficio adicional a tu rutina laboral. Dedica más tiempo a tu cuidado personal.

